Solution 01
Summary
狭い通路も、
段差のある床も、
改修なしで自動搬送
狭いスペースやグレーチング、レール溝なども走破。
従来のAMRが導入しづらい環境でも高精度・スムーズに搬送可能
-
Merit 01
人力搬送の置き換えによる
省人化・安全推進 -
Merit 02
既存環境・レイアウトを
変更せずにAMR導入が可能
Use Case ユースケース
-

自動車製造
Automobile
Manufacturing車両組立エリアの工程間搬送
コンベヤ上で移動する組立車両の間を走行し、終端での部品運送・受け渡しを自動化。深浅レール溝のある床面にも対応することで、これまでの搬送装置ではできなかった作業効率を実現。
-

電子デバイス製造
Electronic Device
Manufacturingロボットブース間の部品コンテナ搬送
両サイドわずか数mmの超狭路を精緻に走行し、高精度な位置決めでコンテナを入替。人手作業と自動化を両立できるように、仕切り壁を維持したまま自動化を実現。
機能・特徴
Function and
Feature
-
01 あらゆる環境に対応する、パワフルな走行性能
球駆動により路面変化に強く、
グレーチング、段差や傾斜した床面でも安定走行。
-
02 超狭路を精緻に走行、狭所でも既存レイアウトのままで活躍
球駆動による全方向移動機構と、高精度のVisual SLAMの組み合わせ
により、ミリ単位の位置決めを実現。600mm幅の隙間でも精緻に走行。
-
03 低床・コンパクトでランダムな配置でも潜り込みが可能
シンプルな機構でコンパクト設計を実現。高精度のVisual SLAMで、整
列されていない設備や台車下も通過可能、レイアウト変更を最小限に。
コア技術 Core Technology
-
01
世界初 球駆動を用いた
産業グレードの全方向移動機構従来の車輪やメカナムホイールでは不可能だった精密な全方向移動を球駆動機構で実現しています。
前後・左右・回転の3つの動きを同時に独立制御でき、どの方向への移動も瞬時に可能に。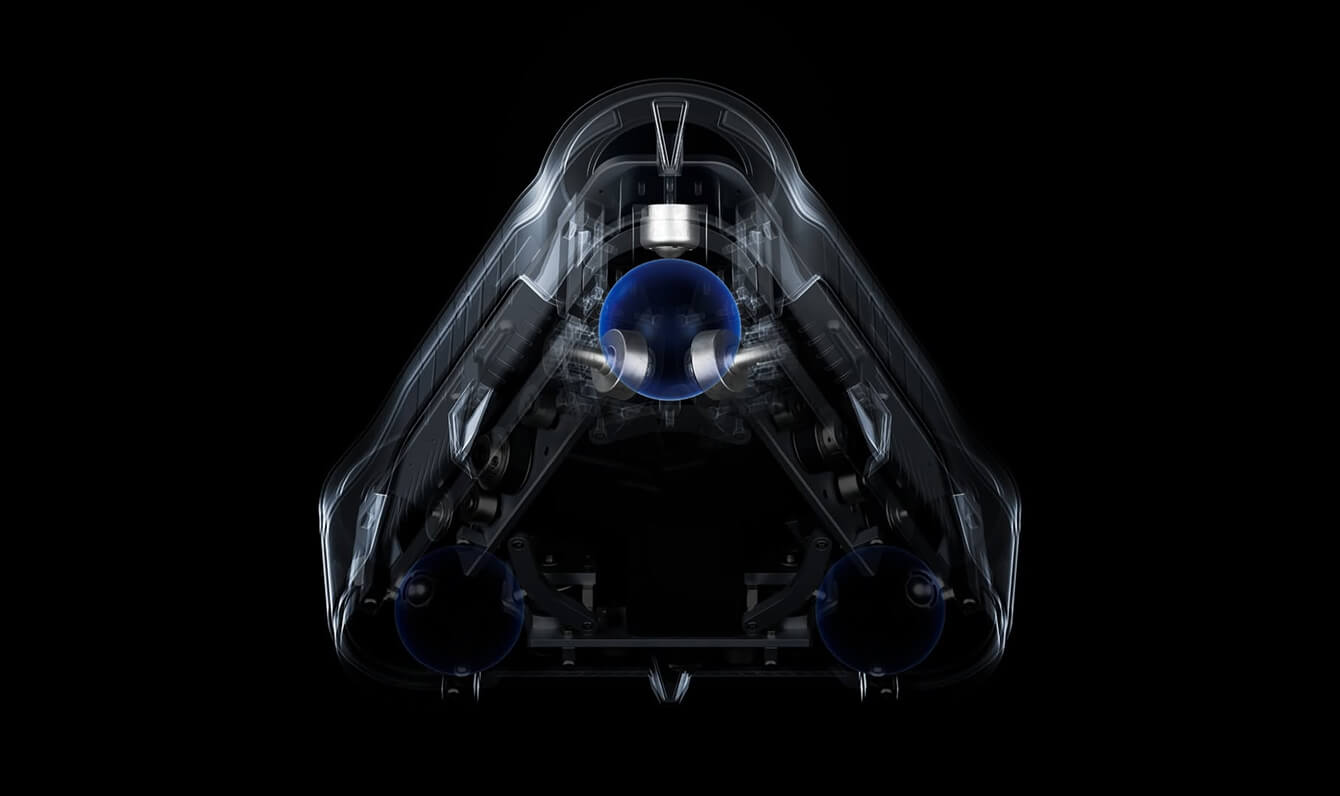
-
02
Visual SLAM
TriOrb独自開発のVisual SLAM(Simultaneous Localization and Mapping)技術により、カメラで取得した視覚情報から周辺環境をリアルタイムで認識。mm単位の高精度な自己位置推定と、詳細な環境地図を同時に構築します。

アプリケーション Application
導入環境に応じたパーツの取り付け、
安全面を考慮したカスタマイズ等にも対応しております。
-
標準モデル
可搬重量 300kgView Detail
-
重量可搬モデル
可搬重量 800kgView Detail
導入プロセス Process
まずは現場の課題をヒアリングさせていただき、
提供価値のご提案と導入効果のシミュレーションを実施いたします。
その後、実機検証を経て本格導入となります。

-
01 課題分析・ご提案
- ヒアリング
- 現場調査
- 課題の明確化
- 提供価値のご提案
-
02 PoC(実証実験)
- 現場走行テスト
- 要件の具体化
-
03 本格導入
- システム構築
- 本番環境での運用
- アフターサポート
よくあるご質問 FAQ
-
Q 稼働時間はどのくらいですか?
-
Q 凸凹や段差のある床面でも走行できますか?
-
Q 屋外でも使用できますか?