球駆動の全方向移動プラットフォームで 生産ラインを革新する
Revolutionize the production line with sphere-driven omnidirectional mobility.



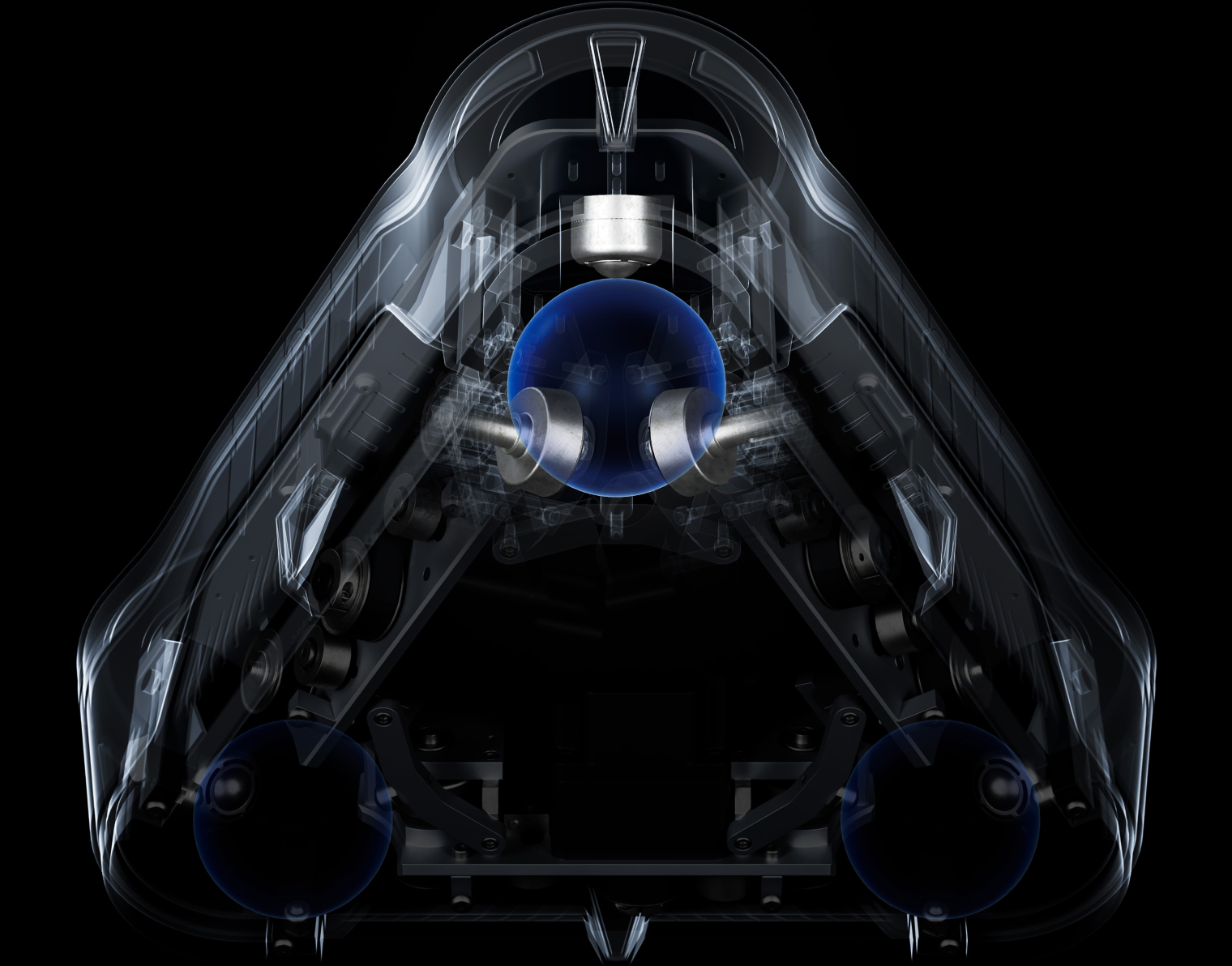

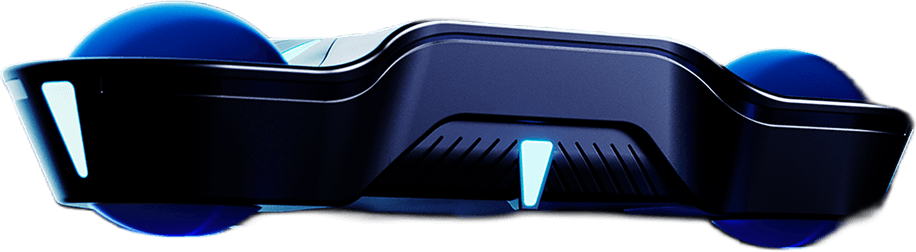
[球駆動式 全方向移動プラットフォーム]

3つの球体と3つのモーターにより、 全方向に自由自在に移動可能。
従来のロボットに実現できなかった、 段差や溝の走行、mm単位の位置決め、 重量物の搬送など、多くの課題を解決します。
Solution ソリューション
-
Solution 01
-
Solution 02
クレーン・リフトでの長尺物・重量物搬送を
AMR複数台協調で代替クレーン待ちや専任オペレーターに縛られていた工程を、AMRで自動化。
複数台連携により、搬送物・工程レイアウト変更に応じた
フレキシブルな搬送が可能で、ROIを最大化 -
Solution 03
TriOrbが実現する未来 Future
Future
固定ラインから
再構成可能な生産システムへ
コンベヤに縛られた大量生産型ラインから、
需要に応じて柔軟に組み替えられる生産システムへ。
TriOrbは、AMRによる搬送の自動化・効率化にとどまらず、
生産プロセス全体を「再構成可能」にします。
TriOrbが描く未来へ向けた
「技術ロードマップ」ムービー
About
TriOrbは、球駆動技術で
人類を移動の制約から解放する、
移動プラットフォーム企業です。