自律移動ソフトウェア群をリリースしました

2023年12月に、自社開発の全方向移動プラットフォーム「TriOrb BASE」の機能を活かすための新しい自律移動ソフトウェア群をリリースしました。
これまでは全方向移動機構に特化したユーザーが主な対象でしたが、この新しい自律移動ソフトウェア群により、これまで全方向移動機構に馴染みのなかったユーザーも、簡単かつ迅速に自律移動プラットフォームを用いた開発に取り組むことができます。TriOrbの自律移動ソフトウェア群は自社独自開発のため、カスタマイズを含めワンストップで提供可能です。
自律移動ソフトウェア群について(2023年12月リリース)
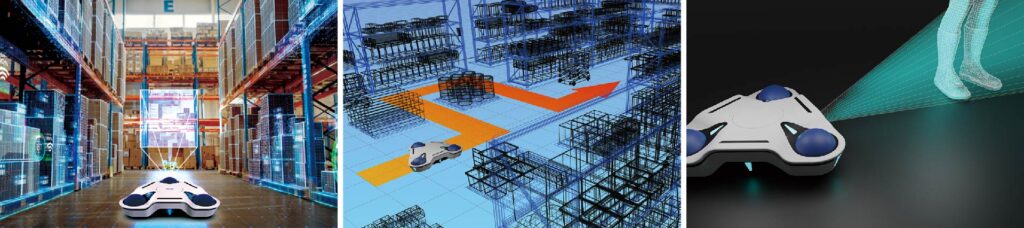
【イメージ図】左から、VISUAL SLAM、 経路作成、安全制御
● VISUAL SLAM(ビジュアルSLAM)
自社開発のVisual SLAM技術を用いて、ロボットは周囲の環境を高精度に認識し、環境地図を構築します。4方向の5つのカメラを使用することで、位置推定の精度が格段に向上し、誤差1cm以下(※)の精密な位置決めが可能となります。これにより、複雑な環境でも高度なナビゲーションが実現します。
※周囲の環境などによって異なります
● 経路作成
A*アルゴリズムをベースとした独自の経路生成ソフトウェアにより、最適かつ効率的な経路が生成されます。このソフトウェアは、障害物が存在する場合の迅速な再経路生成にも対応し、柔軟な運行計画を実現します。
● 安全制御
4方向のカメラと距離センサーを活用することで、障害物や走行可能領域、歩行者の検出が可能です。高さ方向の判定も行うため、運搬物の衝突回避やスロープの安全な通過が実現します。また、歩行者検出時の動作はカスタマイズ可能で、より安全な運用を支援します。
さらに、これらの機能はROS2モジュールとして開発されており、中間データを利用した高度な上位システムの構築が可能です。これにより、ユーザーはより複雑なシナリオや多様なアプリケーションに対応したロボットシステムを容易に実現できます。



