
北九州市八幡西区の北九州イノベーションセンター内「北九州R&Dセンター1901」に、新たに八幡オフィスを開設しました。
八幡オフィスでは新たな開発拠点として、広大な実証フィールドを活用したロボットの性能検証や複数台のロボットを用いた実証実験を行います。また、お客様向けのデモンストレーションの場として活用することで、開発機能強化やプロモーション活動の促進とともに、域内の研究機関やスタートアップ、入居企業との連携を通して地域社会の発展に貢献します。
北九州市八幡西区の北九州イノベーションセンター内「北九州R&Dセンター1901」に、新たに八幡オフィスを開設しました。
八幡オフィスでは新たな開発拠点として、広大な実証フィールドを活用したロボットの性能検証や複数台のロボットを用いた実証実験を行います。また、お客様向けのデモンストレーションの場として活用することで、開発機能強化やプロモーション活動の促進とともに、域内の研究機関やスタートアップ、入居企業との連携を通して地域社会の発展に貢献します。
北九州市による、産学官金が連携してスタートアップ企業の事業成長支援を行う事業化支援プログラム「スタートアップSDGsイノベーショントライアル事業(通称:SIT-K)」に採択頂きました。
本プログラムでは、産業初の全方向型AMR(自律走行搬送ロボット)及び協調制御システムの開発・販売を目指します。
北九州市は素材産業、加工組立産業を中心としたものづくり産業、環境関連産業など様々な業種の企業が立地しておりAMRが幅広く展開可能です。AMRが実現する省人化は生産年齢人口の減少が進む北九州市においても産業持続のために貢献できます。
全方向型AMRの開発およびTriOrb BASEの複数台連携による協調的なタスク処理の実装を目指して、2023年6月に福岡銀行および日本政策金融公庫の協調融資により7,000万円の資金調達を実施しました。これにて、シードラウンドは総額1.1億円の資金調達となりました。本資金は研究開発費および人件費に充当します。
TriOrbは、2023年2月に創業後、TriOrb BASEを用いて製造現場でのロボット導入加速や建築現場での資材搬送システムの実装等(共同研究:戸田建設株式会社、2023年6月~)、産業応用可能なロボットの足を展開しています。今般の資金を基に、2023年秋から冬にかけて自律移動ソフトウェア群のリリースおよび2024年度中に協調移動ソフトウェア群のリリースを目指して開発を進めて参ります。
福岡銀行北九州営業部との協調融資により、新型コロナ対策資本劣後ローン(制度名:「新型コロナウィルス感染症対策挑戦支援資本強化特別貸付」)を実行しました。スタートアップ時の研究・開発や人員確保等で必要となる運転資金の支援を行ったものです。
日本公庫は引き続き、地域の成長を担うスタートアップ企業や、コロナ禍に立ち向かう中小企業・小規模事業者の事業発展・継続を積極的に支援してまいります。
戸田建設株式会社と、建設業界における人手不足の課題解決や重労働作業のロボットへ代替・生産性向上目的に、全方向移動ロボット(TriOrb BASE)を応用した建設現場で自律移動可能な資材搬送装置の開発を目指した共同研究契約を締結しました。
建設現場での走行ロボットの開発に際して、これまで倉庫等で活躍するAMR(自律走行搬送ロボット)の転用が多く試みられてきましたが、建設現場特有の課題である荒れた走行路面、日々変化する環境、多数の資材が配置されたなかで求められる効率的な移動等、所望の性能を実現することは困難でした。
TriOrb BASEはこれらの課題を克服できるポテンシャルがあり、既存のAMRの転用ではなく、建設現場においても安定した走行性能の実現を目指し、自律移動型の資材搬送装置の研究開発に着手することとなりました。今後、TriOrbと戸田建設は建設業界での技術・知見・リソースを組み合わせ、更なる発展を目指します。
【TriOrb BASEを用いた段差や溝、270kgの資材搬送実験の様子】
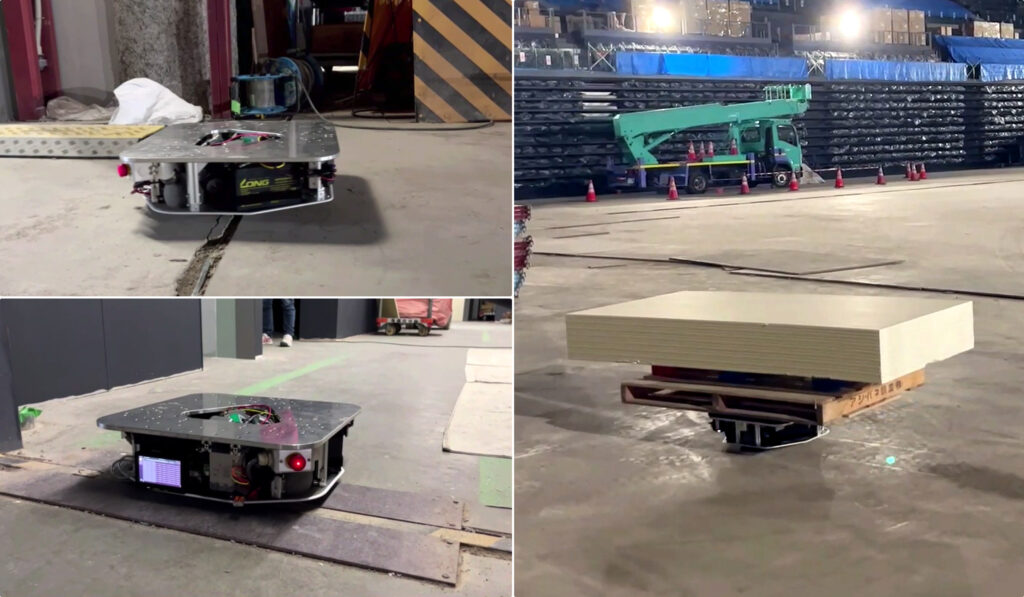
建設現場におけるTriOrb BASEの基本性能を確認するために、現場で課題となる代表的な外乱(段差、溝)や積載重量270kgでの検証実験を実施。実験により得られた基本データを元にTriOrb BASEのハードウェア改修を実施し、現場環境下で自在に走行可能な自律型全方向移動ロボットの開発に取り組みます。
建設現場における建築資機材の搬入では、搬入車両からの荷下ろしをはじめ、工事用 ELVによる目的フロアへの揚重、目的フロア到着後の所定の位置への移動のすべてを人の手で行ってきました。これらの運搬作業は重労働であり、多くの人手を必要とする一方で、建設業界は作業員の減少や高齢化が進んでおり、作業の省力化が求められています。
弊社はこれまで試行を重ね、多くの課題に直面してきました。これらの課題解決に対し TriOrb BASEの可搬性能、精緻な移動性能、高度な制御機能には高い期待を持っております。そしてTriOrbの持つロボット技術に我々の持つ建設現場の技術・知見・リソースを組み合わせ、建設現場のさらなる生産性向上を目指します。
第35回日本ものづくりワールド(会期:2023年6月21日(水)~23日(金)、会場:東京ビッグサイト)に出展します。
本展示会では、ロボットの足として高性能な移動プラットフォーム“TriOrb BASE”を出展します。
TriOrb BASEは産業用途に応用可能な全方向移動機構であり、mm単位の精緻な位置調整、数百kgの耐荷重、段差・溝・傾斜等の外乱走破性を備えます。ブースでは機構の概要を紹介する静展示および実際の移動性能を体感頂けるデモ走行を実施します。
高性能な足によって貴社サービスの更なる価値向上に貢献します。
皆さまのご来場をお待ちしております。
2023年4月に実施したシードラウンドにおいて、株式会社みらい創造機構の運営するみらい創造二号投資事業 有限責任組合を引受先としたJ-KISS型新株予約券の発行により4,000万円の資金調達を実施し、併せて同社の執行役員/パートナーの高橋遼平氏が社外取締役に就任しました。 今般のシードラウンドにおける資金調達により、効率的な移動を支える自律移動ソフトウェア群および協調搬送・作業システムの開発を進めて参ります。
2008年に球駆動式全方向移動機構の研究開発をスタートし、国立研究開発法人 科学技術振興機構(JST)の2019年度 社会還元加速プログラム(SCORE)、 2020年度 JST 大学発新産業創出プログラム(START)に採択頂き、START期間中の2023年2月13日、福岡県北九州市に本社を設置するに至りました。そしてこの度、START事業プロモーター・北九州市認定VCであるみらい創造機構をリード投資家とする資金調達を実施し、同社 執行役員/パートナーの高橋遼平氏を社外取締役に迎えることができましたこと、大変嬉しく思います。引き続き皆様のご支援のほど、よろしくお願い申し上げます。
石田社長とは、起業に向けて1年以上継続して議論させて頂いており、初めてTriOrb BASEの前身となるデバイスを見た時の感動を今でも覚えております。高い技術力と大きなビジョンを持ったTriOrbのメンバーなら、必ず産業界の複雑な課題を解決してくれると信じており、私も微力ながらオールTriOrbの一員として貢献できればと思います。
C O N T A C T U S



