2023年12月28日に東京大学エッジキャピタルパートナーズ(以下UTEC)、みらい創造機構、DRONE FUNDを引受先とする第三者割当増資により、シリーズAラウンドにおいて総額3.3億円の資金調達を実施、併せてUTEC取締役COOの坂本教晃氏が社外取締役に就任しました。これにより、累計調達額は4.4億円となりました。
調達した資金を活用し、研究開発の促進、組織体制の強化を行って参ります。
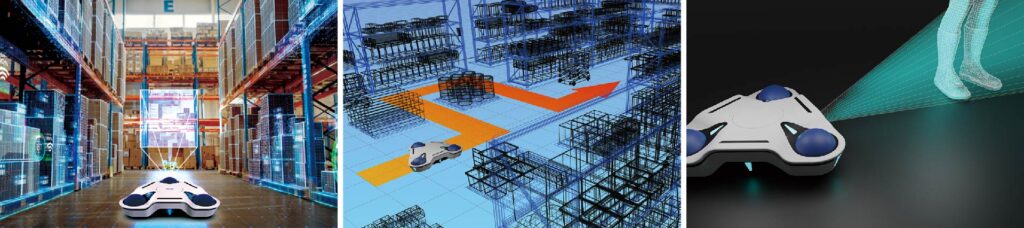
TriOrbは、2023年2月に創業後、九州工業大学の発明である球駆動式全方向移動機構をコア技術として、産業技術総合研究所での研究成果をもとに自律移動プラットフォームのTriOrb BASEをリリースしました。今後、複数台が陸上のドローンのように協調的に連携することで、長尺物や重量物などの様々な荷姿に対応した柔軟な搬送システムの実現を通して産業改革のボトルネック解消を目指しています。
TriOrb BASEについて
TriOrb BASEは、AMRや多種多様なロボットの足として利用できる高性能な移動プラットフォームであり、製造現場の効率と生産性を飛躍的に向上させます。従来の全方向移動機構に比べコンパクトでありながら高い走破性や移動性能を持つため、製造現場などの荒れた床面や狭い場所での活用、精緻な移動が必要な場面での活躍が期待できます。また、シンプルな構造であるため、メンテナンスの簡易性を有しているのも大きな特徴です。 この革新的なプラットフォームについてのさらなる情報は、TriOrbのウェブサイト(https://www.triorb.co.jp/#base)でご確認いただけます。
また、TriOrb BASEの移動性能をさらに引き出す、自律移動ソフトウェアを2023年12月にリリースしました。TriOrbのソフトウェアは自社独自開発のため、カスタマイズを含めワンストップで提供可能です。さらに、弊社のソフトウェアはROS2モジュールとして開発されており、中間データの活用も可能なため、それらを利用することでユーザー自身でも利用状況に合わせたカスタマイズを行えます。これにより、ユーザーの環境下にある多様なアプリケーションに対応したロボットシステムを構築することが可能です。
●社外取締役 坂本教晃氏(UTEC 取締役COO/パートナー/マネージングディレクター)のコメント
TriOrb社はシンプルで強い特許をベースに、大きく事業展開をしようとされております。AGVに留まらず、広くモビリティの観点からもプラットフォームとなり得る可能性を十分秘めていると期待しています。今後大きな課題に挑戦するTriOrb社とUTECが伴走できること、大変楽しみです。また、TriOrb社には北九州市の方の熱い想いでお会いすることができました。まさに産官学連携の観点からも大きな価値を出していけたらと思っております。
●社外取締役 高橋遼平氏(みらい創造機構 執行役員/パートナー)のコメント
この度、UTECさん、DRONE FUNDさんという、ロボティクススタートアップ業界の成長を支えてきた、プロフェッショナルの皆様にご参画頂き、大変心強く思います。
TriOrbの創業メンバーとは起業前から議論をしておりますが、常に私の想定を上回るスピードで事業を拡大しており、いつもワクワクしながらミーティングに臨んでいます。そんな石田CEO、嶋野COOをはじめとしたメンバーだからこそ、優秀なメンバーや、投資家を惹き付けるのだと感じています。
今後も、TriOrbメンバー、パートナーの皆様、並びに株主を含めたAll TriOrbの一員として、産業界の発展に貢献できればと思います。
●大前創希氏(DRONE FUND 共同創業者/代表パートナー)のコメント
DRONE FUNDでは「ドローン・エアモビリティ前提社会」の実現に向けて、陸海空の自律型ロボットの社会実装を推進しています。TriOrbが持つ全方向移動機構技術は、これまでAGVの導入が難しかった製造・建設現場でのAGVの導入を可能とするものであり、人手不足に悩む現場の効率化に寄与するものと期待しています。
TriOrb は技術的な強みを背景に起業したスタートアップでありながら、顧客のニーズを的確に捉え、短期間での製品開発を行っている点を高く評価し、投資を決定しました。
今後はDRONE FUND投資先同士のシナジー、LP投資家との社会実装に向けた取り組みなどを通じて、TriOrbの成長に貢献していきたいと思います。
●TriOrb代表取締役CEO 石田秀一のコメント
弊社はモビリティの活用による製造業改革のボトルネック解消を目指し、全方向型自律移動プラットフォームの研究開発および製造に注力しています。今回の資金調達により、プラットフォームの性能向上だけでなく、複数のロボットの協調作業を通じて新たな価値を生み出す取り組みを加速して参ります。この資金調達では、既存投資家であるみらい創造機構様に加えて、新たにUTEC様とDRONE FUND様からのご支援を受け、ますます強化された資本基盤を築くことができました。また、UTEC 坂本教晃氏を社外取締役に迎えることで、弊社の経営体制も強化されました。弊社は、産業初の全方向型自律移動プラットフォームの社会実装を通じて、製造業のイノベーションに貢献してまいります。