移動プラットフォームで、
次世代産業の基盤をつくる
News
-

三菱地所「xTECH」にCEO 石田のインタビューが掲載されました。
Read More -
スタートアップカンファレンス「WORK AND ROLE 2026」に登壇・出展いたします。
Read More -

米国デトロイトに現地法人を設立・東京 大手町オフィスを開設
Read More -

経済産業省支援セミナー「オープン&クローズ戦略」に登壇します
Read More -
YouTube「ReHac9(リハック九州)」に代表の石田が出演しました
Read More -

『Forbes JAPAN』2026年4月号に注目のスタートアップとして掲載いただきました。
Read More -

Factory Innovation Week 「第10回ロボデックス」に出展します【1/21...
Read More -
産総研HCMIコンソーシアム主催「RX推進人材育成講座」において鴻池運輸株式会社×TriOrb...
Read More -

TriOrb BASEがスギノマシン社の新型モバイルマニピュレータに採用されました ~狭小スペ...
Read More -

CEOの石田がUTECのPodcastに出演いたしました(後編)
Read More -

【出展】2025国際ロボット展にYUAN High-Tech様と共同出展します。
Read More -

CEOの石田がUTECのPodcastに出演いたしました(前編)
Read More -

【経済産業省 OCEANプロジェクト】九州工業大学とのオープン&クローズ戦略推進実証事...
Read More -

TriOrb BASEがEXPO 2025で伝統芸能「神楽」とのコラボパフォーマンスを披露
Read More -

融資およびプレシリーズB2ラウンドにて総額6.6 億円(累計13.5 億円)の資金調達を実施しました
Read More -
Factory Innovation Week 2025に出展します
Read More -

CES2025(1月8日〜11日)に出展します
Read More -

KVM2024にて「大賞」「NICT賞」を受賞しました
Read More -
AIST Solutions主催スタートアップイベントに登壇します
Read More -

CEATEC 2024(10月15日(火)~10月18日(金))に出展します
Read More -

プレシリーズBラウンドにて総額2.5 億円(累計6.9 億円)の資金調達を実施しました
Read More -

週刊東洋経済の特集「すごいベンチャー100」2024年版に選出されました
Read More -
「J-Startup KYUSHU」に選定されました。
Read More -

NEDO DTSU事業(STSフェーズ)に採択されました。
Read More -

国際物流総合展2024(9月10日(火)~9月13日(金))に出展します
Read More -

“AISolスタートアップ”として認定いただきました
Read More -

JR東日本スタートアップ(株)主催の「STARTUP PITCH#8」に採択されました
Read More -

【国際会議出展】IEEE ICRA2024(5月13日(月)~5月16日(木))に出展します
Read More -

第9回 JEITAベンチャー賞を受賞しました
Read More -

【展示会出展】九州自動車関連技術展示商談会in刈谷(2月5日(月)・6日(火))に出展します
Read More -

シリーズAラウンドにて3.3億円の資金調達を実施しました
Read More -

【展示会出展】Factory Innovation Week 2024(1 月 24 日(水)...
Read More -

自律移動ソフトウェア群をリリースしました
Read More -

Silicon Valley December Summit 2023 のEast Asia ...
Read More -

ILS2023スタートアップショー 12月4日(月)・5日(火)にブース出展します
Read More -
【展示会出展】2023国際ロボット展(11月29日(水)~12月2日(土))に出展します
Read More -

新たな開発拠点として「八幡オフィス」を北九州市八幡西区に開設しました
Read More -

北九州市「スタートアップSDGsイノベーショントライアル事業(通称:SIT-K)」に採択頂きました
Read More -

7,000万円のデッド調達を実施しました
Read More -

戸田建設株式会社と、資材搬送装置開発に向けた共同研究を開始しました
Read More -

【展示会出展】第35回日本ものづくりワールド 6月21日(水)~23日(金)に出展します
Read More -

シードラウンドにおいて、4,000万円の資金調達を実施しました
Read More
About
-
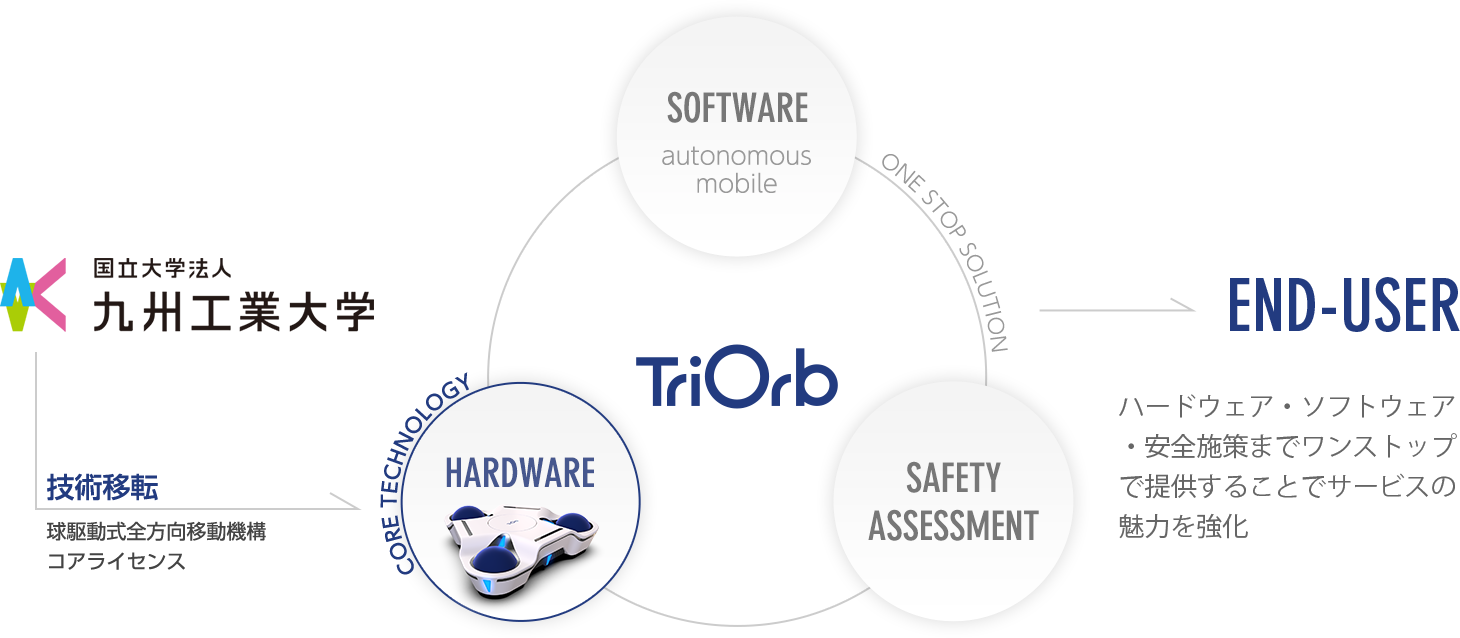
株式会社トライオーブは、(国研)科学技術振興機構 大学発新産業創出プログラム (START:九州工業大学/産業技術総合研究所)により創出された九州工業大学発の協調移動ロボットベンチャーです。
九州工業大学からの技術移転をコア技術としたハードウェアに加え、移動を支えるソフトウェア群、運用を想定した安全方策までワンストップで提供することで、サービスの魅力を強化します。 -
会社名 株式会社TriOrb(トライオーブ) 所在地 【八幡オフィス】
福岡県北九州市八幡西区美吉野町 16番 北九州イノベーションセンター内
【佐賀オフィス】
佐賀県鳥栖市宿町807-1 産業技術総合研究所九州センター
【臨海オフィス】
東京都江東区青海2-4-7 産業技術総合研究所 臨海副都心センター 別館事業内容 ロボットの開発、製造、販売、保守、ソフトウェアの開発、販売及び保守 設立 2023年2月 資本金 1億円(2025年9月末時点) 代表者 代表取締役 CEO 石田 秀一 社員数 役員5名(うち社外3名)、従業員30名(うち正社員23名)(2025年9月末現在)
Equity Partners
Technology
-
3つの球体と3つのモータのシンプルな構成で全方向に自由自在に移動できる全く新しい高性能球駆動式全方向移動機構。
既存の全方向移動ロボットで解決できなった外乱走破、位置決め精度,耐荷重などの課題をクリアできます。 -
球駆動全方向移動機構とは
©国立研究開発法人産業技術総合研究所
(産総研公式動画)
Team
-

代表取締役 CEO
石田 秀一 | 博士(工学)
ISHIDA Shuichi
九州工業大学大学院生命体工学研究科博士後期課程修了。日本最大級の公的研究機関である産総研で製造業向けの生産システム/プロセス評価に関する研究に10年取り組む。自律移動ロボットの世界的な競技会であるRoboCup Soccerでチーム代表として日本大会優勝、世界大会技術部門2位を受賞。
-
取締役 COO
嶋野 仁士
SHIMANO Satoshi
九州大学法学部卒業後、日本最大手商業銀行の三菱UFJ銀行に入行。営業を7年、本部企画を8年取り組む。主に、新規事業立ち上げや金融商品の企画開発に携わる。
-

社外取締役
戸田 広樹
TODA Hiroki
東京大学工学系研究科 博士後期課程修了。その後ベイン・アンド・カンパニーにてPEファンド向けのDD、消費財企業のコストカット案件に従事。UTECでは、主にハードウェア領域の投資及びValue Addを担当。
-

社外取締役
高橋 遼平 | 博士(工学)
TAKAHASHI Ryohei
京都大学経済学部卒業後、三菱商事株式会社入社。建設業界向けクラウドサービスの事業開発に従事。同社退職後、医療系大学発ベンチャーを起業し、大手事業会社へのM&Aを実現。また、米系戦略コンサルティングファームにおける、デジタル領域の戦略策定に従事。東京工業大学 環境社会理工学院 イノベーション科学系卒業。
-

監査役
坂本 教晃
SAKAMOTO Noriaki
東京大学経済学部卒業後、経済産業省入省。2008年経済産業省退官、流通事業会社の副社長を経て、コロンビア大学経営学修士(MBA)。McKinsey & Company を経て、2014年8月にUTEC参画。日本ベンチャーキャピタル協会(JVCA)企画部長。
販売実績について
販売実績について教えてください
個別の導入先事例は以下のとおりです。
・日本製鋼所M&E 株式会社様長尺物の搬送を可能にする協調搬送システムのPoC を進行中
・EMAGE 社様(株式会社南陽様を通じて)シンガポールに拠点がある企業であり、「TriOrb BASE」のハードを用いた搬送ソリューションの実装に向けたPoC を進行中
その他、製造(自動車・電子部品・半導体など)・建設・海外市場の現場において、数十社の複数の企業様と実証実験(PoC)を進めております。
ロボットの導入について
ロボット本体の価格は?
機器仕様や構成により価格が異なります。ご要望に合わせたお見積りをいたしますので、まずはお気軽にお問い合わせください。
導入予定の現場で走行テストを行うことは可能ですか?
はい、可能です。現場環境やご要望の内容を確認のうえ、最適な形でテストを実施いたします。詳細は、お問い合わせください。
実機を見学することはできますか?
はい、可能です。弊社の八幡オフィスや臨海オフィスにて、実機の見学やデモをご覧いただけます。お問い合わせフォームからご希望の日時をお知らせください。
海外でも利用できますか?
現在は国内を中心に展開していますが、海外での導入実績もございます。海外でのご利用を検討されている場合は、ぜひお問い合わせください。
ロボットの仕様・機能について
どのぐらいの重量を運ぶことができますか?
標準スタンダードモデルでは、1台で最大300kgまでの運搬が可能です。カスタマイズ実績としては、1台で最大800kgの運搬にも対応しています。また、いずれのモデルでも、複数台が連携して搬送する「協調搬送システム」をご利用いただけます。
稼働時間はどのくらいですか?
オプションでご用意していますバッテリーでは、連続稼働3.5時間です。お客様のご利用状況に合わせてバッテリー容量を調整することも可能です。詳細は、お問い合わせください。
屋外でも使用できますか?
基本的には、屋内での運用を想定していますが、条件次第では屋外でのご使用も可能です。詳細は、お問い合わせください。
凸凹や段差のある床面でも走行できますか?
標準仕様では、溝45mm・段差10mm・勾配9°程度まで走行可能です。標準の球径はφ100ですが、φ140やφ200での製作実績もございます。その他の球径をご要望の場合は、気軽にお問い合わせください。
障害物検知や非常停止など、安全対策機能はありますか?
はい、ございます。セーフティレーザースキャナ-による障害物検知に伴う停止、バンパーセンサーによる衝突に伴う停止機能をオプションとしてご用意しております。また、遠隔非常停止機能も製作実績がございます。
どのようなオプションがありますか?
これまでの製作実績として、以下のオプションをご提供しています。
・リフトアップ機能
・ワイヤレス充電
・セーフティレーザースキャナ-による障害物検知
・バンパーセンサーによる衝突停止機能
・遠隔非常停止機能
どのようにして位置を認識して走行していますか?
ロボット本体の四方向に取り付けた魚眼カメラで周囲の環境を認識しています。その情報を基に、Visual SLAM技術を活用して環境地図を作成し、自己位置を推定しながら走行しています。
協調搬送は最大何台まで可能ですか?
自律走行は、2台での協調搬送を実装済みです。また、リモコン操作の場合は最大4台までのテストを完了しています。
自社の上位製造システム(WMSやMES等)との連携は可能ですか
弊社単体では、足回りのハードウェア(TriOrb BASE)と自律移動等のSWの領域に限定したサービスを提供いたします。お客様の自社システム開発やお客様のロボットと結合するための開発をご希望の場合は、パートナの商社やSIer等と連携の上、ご提案させていただきます。まずは弊社宛お問い合わせ欄より、お客様の課題・ニーズをお聞かせください。
耐久性・メンテナンスについて教えてください
消耗品は球とベルトのみで構成され、球はウレタン素材(たとえばジェットコースターのローラにも使用されています)のため非常に高い耐久性があります。また、パーツ点数が少なく構造がシンプルで、一般的な既成部品等を使用しているため、メンテナンスは非常に容易です。
不具合や壊れた場合の対応を教えてください
初期対応として電話や非対面を活用して原因や状況を確認させていただきます。初期対応で復旧しない場合は、弊社宛に実機を送付いただいたうえで原因を特定します。その後、修理にかかるお見積もりを提示させていただきます。修理代は、初期不良の場合を除きお客様のご負担になります。尚、パーツの在庫状況次第では1か月程度お時間をいただく可能性もございます。
C O N T A C T U S