News

戸田建設株式会社と、資材搬送装置開発に向けた共同研究を開始しました
戸田建設株式会社と、建設業界における人手不足の課題解決や重労働作業のロボットへ代替・生産性向上目的に、全方向移動ロボット(TriOrb BASE)を応用した建設現場で自律移動可能な資材搬送装置の開発を目指した共同研究契約を締結しました。
建設現場での走行ロボットの開発に際して、これまで倉庫等で活躍するAMR(自律走行搬送ロボット)の転用が多く試みられてきましたが、建設現場特有の課題である荒れた走行路面、日々変化する環境、多数の資材が配置されたなかで求められる効率的な移動等、所望の性能を実現することは困難でした。
TriOrb BASEはこれらの課題を克服できるポテンシャルがあり、既存のAMRの転用ではなく、建設現場においても安定した走行性能の実現を目指し、自律移動型の資材搬送装置の研究開発に着手することとなりました。今後、TriOrbと戸田建設は建設業界での技術・知見・リソースを組み合わせ、更なる発展を目指します。
【TriOrb BASEを用いた段差や溝、270kgの資材搬送実験の様子】
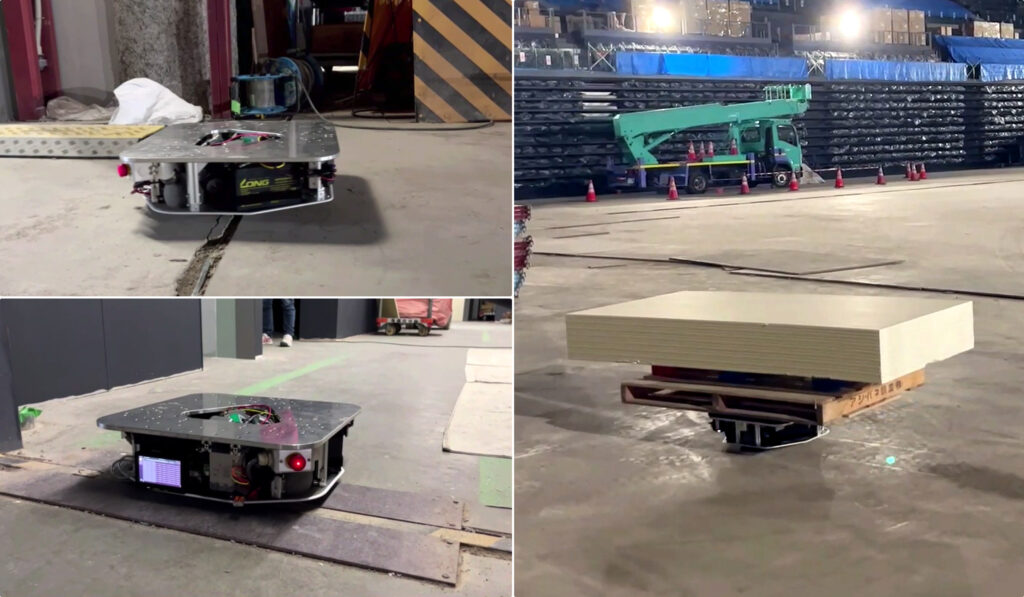
建設現場におけるTriOrb BASEの基本性能を確認するために、現場で課題となる代表的な外乱(段差、溝)や積載重量270kgでの検証実験を実施。実験により得られた基本データを元にTriOrb BASEのハードウェア改修を実施し、現場環境下で自在に走行可能な自律型全方向移動ロボットの開発に取り組みます。
戸田建設株式会社のコメント
建設現場における建築資機材の搬入では、搬入車両からの荷下ろしをはじめ、工事用 ELVによる目的フロアへの揚重、目的フロア到着後の所定の位置への移動のすべてを人の手で行ってきました。これらの運搬作業は重労働であり、多くの人手を必要とする一方で、建設業界は作業員の減少や高齢化が進んでおり、作業の省力化が求められています。
弊社はこれまで試行を重ね、多くの課題に直面してきました。これらの課題解決に対し TriOrb BASEの可搬性能、精緻な移動性能、高度な制御機能には高い期待を持っております。そしてTriOrbの持つロボット技術に我々の持つ建設現場の技術・知見・リソースを組み合わせ、建設現場のさらなる生産性向上を目指します。

- 融資およびプレシリーズB2ラウンドにて総額6.6 億円(累計13.5 億円)の資金調達を実施しました
デットファイナンスにより株式会社みずほ銀行から5億円の資金調達を実施しました。併せて、株式会社東京大学エッジキャピタルパートナーズ(UTE…
- Factory Innovation Week 2025に出展します
2025年1月22日(水)から1月24日(金)にかけて、東京ビッグサイトで開催される「Factory Innovation Week 20…

- CES2025(1月8日〜11日)に出展します
米国ネバダ州・ラスベガスで開催される世界最大級のデジタル技術の見本市「CES 2025」(開催期間:2025年1月7日~10日)に九州工業…
-
- 融資およびプレシリーズB2ラウンドにて総額6.6 億円(累計13.5 億円)の資金調達を実施しました
デットファイナンスにより株式会社みずほ銀行から5億円の資金調達を実施しました。併せて、株式会社東京大学エッジキャピタルパートナーズ(UTE…
-
- Factory Innovation Week 2025に出展します
2025年1月22日(水)から1月24日(金)にかけて、東京ビッグサイトで開催される「Factory Innovation Week 20…
-
- CES2025(1月8日〜11日)に出展します
米国ネバダ州・ラスベガスで開催される世界最大級のデジタル技術の見本市「CES 2025」(開催期間:2025年1月7日~10日)に九州工業…
C O N T A C T U S